
In recent years, a variety of new touch sensing technologies using different materials and transduction methods have been introduced, giving rise to a series of tremendously improved designs of electronic skins suitable for humanoid robots. Unfortunately, most of these devices are still quite large and are fabricated on rigid substrates, so they cannot be completely integrated onto specific areas, such as robot fingertips, where a large number of sensors are required on a limited and non-planar surface. For this reason, the development of a highly flexible, conformable and fully distributed tactile technology capable of delivering a ultra-thin and lightweight artificial skin, is currently a key issue. Recently, mechanically flexible touch sensors using organic FETs have been developed for large area skin type of applications. However, best organic FETs are known to have a mobility of about 1 cm2/Vs, which limits their use to the recording of slow varying contact forces only. On the other hand, devices based on Piezoelectric Oxide Semiconductor Field Effect Transistors show very good electrical performance, although presently limited by the use of conventional crystalline silicon MOS that does not allow direct integration on non-planar surfaces.
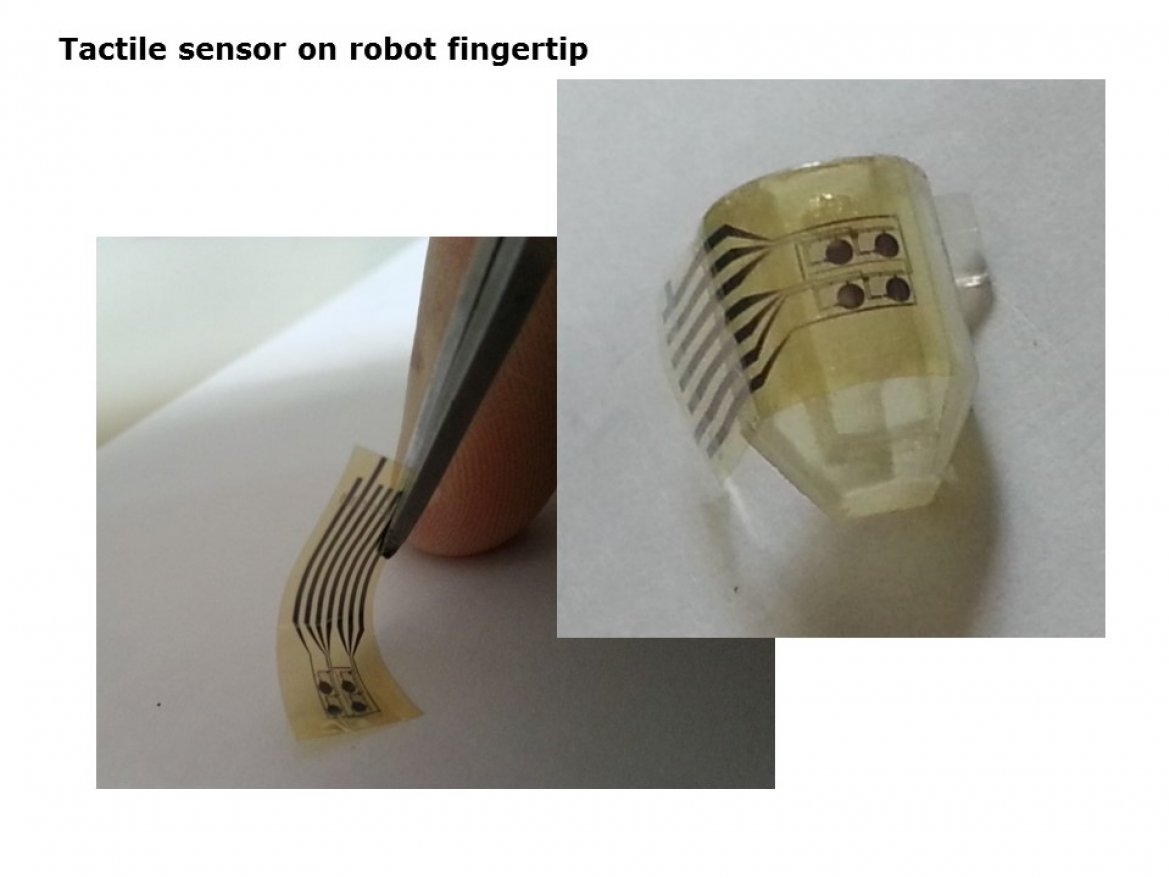
Here we propose High performing hybrid flexible tactile sensors, based on piezoelectric P(VDF-TrFE) films and low-temperature polycrystalline silicon thin film transistors (LTPS TFTs), have been fabricated and tested: the devices are embedded on ultrathin polyimide substrates (about 10 mm thick) and show a high degree of bendability. To reach these results a poling procedure with an electric field up to 3 MV/cm was performed to further enhance the piezoelectric coefficient d33 on the sensor designed in an extended gate configuration. Tactile sensors, biased in a common-source arrangement, showed a linear response to increasing sinusoidal stimuli (up to 2 N) and increasing operating frequencies (up to 1200 Hz).
This work has been conducted in collaboration with the department of from IIT in Genova